RoadRunner transit model example II - custom limb darkening#
Author: Hannu Parviainen Last modified: 23 April 2024
Here we look at using the RoadRunner transit model with a custom limb darkening model. This can be done in two ways. First, you can initialise RoadRunnerModel with a Python callable that return the limb darkening profile as a function of  and a parameter vector, or you can initialise the model with a subclass of the
and a parameter vector, or you can initialise the model with a subclass of the pytransit.LDModel. In the first case you can also give a callable that returns the integral of the brightness profile over the stellar disk, and in the second
case you can implement the integral in the class.
[1]:
%matplotlib inline
from matplotlib.pyplot import plot, subplots, setp
from matplotlib import rc
from numpy.random import normal, uniform
from numpy import arange, array, ndarray, linspace, pi, repeat, tile, zeros
rc('figure', figsize=(13,5))
Import the model#
We start by importing the RoadRunnerModel from pytransit, and also import njit from numba to accelerate our limb darkening model.
[2]:
from pytransit import RoadRunnerModel
from numba import njit
[3]:
time = linspace(-0.05, 0.05, 1500)
Approach I: give a limb darkening model as function#
Define the limb darkening function#
We use a quadratic model for a nice and familiar example, although it is also implemented as a named limb darkening model. The stellar surface brightness is

and its integral over the stellar disk is

Note that the integral function is not required, but gives a minor performance and accuracy boost. The integral is calculated numerically for each model call if the integral function is not given, but this is fast because it only requires some additional (200 by default) limb darkening model evaluations.
[4]:
@njit(fastmath=True)
def ld_quadratic(mu, pv):
"""Quadratic limb darkening model"""
return 1. - pv[0] * (1. - mu) - pv[1] * (1. - mu) ** 2
@njit(fastmath=True)
def ldi_quadratic(pv):
"""Quadratic limb darkening model integrated over the stellar disk"""
return 2*pi * 1/12 * (-2 * pv[0] - pv[1] + 6)
Initialise and evaluate the model#
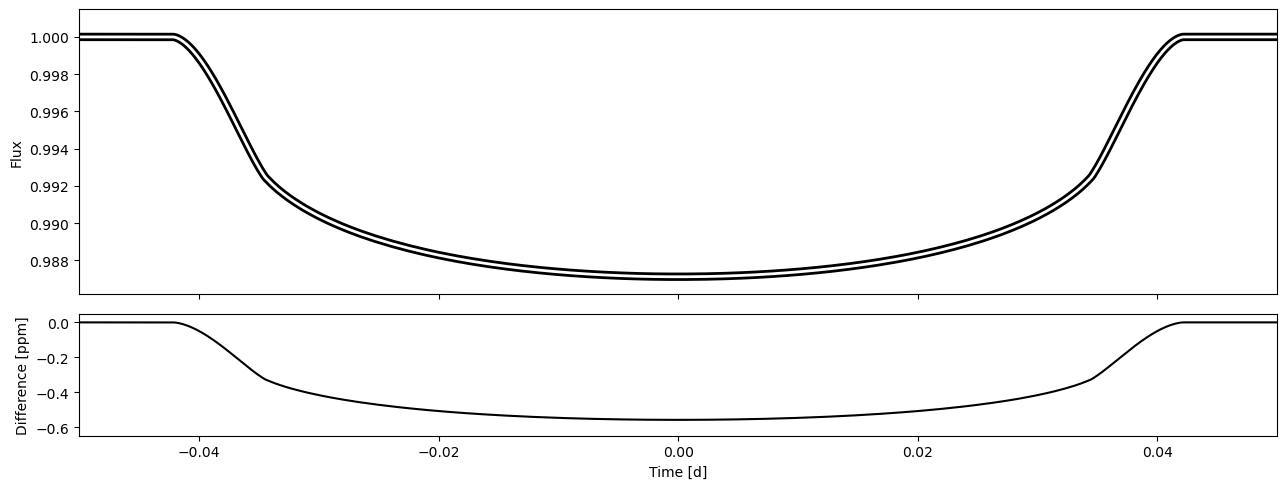
Create a model instance without (tm1) and with (tm2) the integral function. The rest of the model evaluation and setup is exactly as before.
[5]:
tm1 = RoadRunnerModel(ld_quadratic)
tm1.set_data(time)
tm2 = RoadRunnerModel((ld_quadratic, ldi_quadratic))
tm2.set_data(time)
[6]:
flux1 = tm1.evaluate(k=0.1, ldc=[0.56, 0.23], t0=0.0, p=1.0, a=4.2, i=0.5*pi, e=0.0, w=0.0)
flux2 = tm2.evaluate(k=0.1, ldc=[0.56, 0.23], t0=0.0, p=1.0, a=4.2, i=0.5*pi, e=0.0, w=0.0)
[7]:
fig, axs = subplots(2,1, gridspec_kw={'height_ratios':(0.7,0.3)}, sharex='all')
axs[0].plot(time, flux2, lw=6, c='k')
axs[0].plot(time, flux1, lw=2, c='w')
axs[1].plot(time, 1e6*(flux1-flux2), c='k')
setp(axs, xlim=time[[0,-1]])
setp(axs[0], ylabel='Flux', ylim=(0.9862, 1.0015))
setp(axs[1], xlabel='Time [d]',ylim=(-0.65,0.05), ylabel='Difference [ppm]')
fig.tight_layout()
Approach II: implement the limb darkening function as a subclass of LDModel#
Implementing the limb darkening model as a subclass of LDModel is a bit more work, but can be the best approach when the model is something more complex than just a short equation, or if the model evaluation speed is essential.
[8]:
from pytransit.models.ldmodel import LDModel
The first approach (giving the limb darkening model as a function) assumes that the function evaluates the model for a single parameter vector. PyTransit, however, generally assumes that we’re parallelising our model evaluation, and so internally deals with 3D limb darkening parameter arrays of shape [npv, npb, nldp], where npv is the number of paramter vectors, npbis the number of passbands, and nldp is the number of limb darkening model specific parameters.
The RoadRunner model wraps the given limb darkening function with a numba-based wrapper that makes the model “”just work” no matter whether we give it a 1D (one parameter vector and one passband), 2D (one parameter vector but multiple passbands), or 3D (multiple parametr vectors and multiple passbands) parameter array. This wrapping adds a small overhead ( s) to the limb darkening model evaluation, which doesn’t really matter much when dealing with larger real-life science
cases, but it can be avoided to give limb darkening model evaluation speed below s by writing the model as a subclass of
s) to the limb darkening model evaluation, which doesn’t really matter much when dealing with larger real-life science
cases, but it can be avoided to give limb darkening model evaluation speed below s by writing the model as a subclass of LDModel.
LDModel is a very simple class in itself. The __init__ takes only the  resolution for numerical integration (
resolution for numerical integration (niz). The __call__ method takes a array and an input parameter array that can be either 1D, 2D, or 3D (described later), and returns 3D limb darkening profile array and their integrals over the stellar disk calculated using the _evaluate and _integrate methods.
class LDModel:
def __init__(self, niz: int = 200):
self._int_z = linspace(0, 1, niz)
self._int_mu = sqrt(1 - self._int_z ** 2)
def __call__(self, mu: ndarray, x: ndarray) -> Tuple[ndarray, ndarray]:
return self._evaluate(mu, x), self._integrate(x)
def _evaluate(self, mu: ndarray, x:ndarray) -> ndarray:
raise NotImplementedError
def _integrate(self, x: ndarray) -> ndarray:
if x.ndim == 1:
x = x.reshape((1, 1, -1))
elif x.ndim == 2:
x = x.reshape((1, x.shape[1], -1))
npv = x.shape[0]
npb = x.shape[1]
ldi = zeros((npv, npb))
for ipv in range(npv):
for ipb in range(npb):
ldi[ipv,ipb] = 2. * pi * trapz(self._int_z * self(self._int_mu, x), self._int_z)
return ldi
Approach II a#
While subclassing LDModel is more useful for complex limb darkening models, I’ll use the quadratic model as a familiar example again.
Now, we need to make sure that we return an array with shape [npv, npb, nmu], no matter the dimensionality of the input limb darkening parameter array pvo. If the input array is one-dimensional, we assume npv = 1 and npb = 1. If it is two-dimensional, we assume npv = 1 and npb = pvo.shape[0]. Finally, for a three-dimensional input array, npv = pvo.shape[0] and npb = pvo.shape[1].
First, an example where we override the _evaluate and _integrate methods separately and leave __call__ untouched.
[9]:
@njit
def _eval_quadratic(mu: ndarray, pvo: ndarray) -> ndarray:
if pvo.ndim == 1:
pv = pvo.reshape((1, 1, -1))
elif pvo.ndim == 2:
pv = pvo.reshape((1, pvo.shape[1], -1))
else:
pv = pvo
npv = pv.shape[0]
npb = pv.shape[1]
ldp = zeros((npv, npb, mu.size))
for ipv in range(npv):
for ipb in range(npb):
ldp[ipv, ipb, :] = 1. - pv[ipv, ipb, 0] * (1. - mu) - pv[ipv, ipb, 1] * (1. - mu) ** 2
return ldp
@njit
def _integrate_quadratic(pvo: ndarray) -> ndarray:
if pvo.ndim == 1:
pv = pvo.reshape((1, 1, -1))
elif pvo.ndim == 2:
pv = pvo.reshape((1, pvo.shape[1], -1))
else:
pv = pvo
npv = pv.shape[0]
npb = pv.shape[1]
ldi = zeros((npv, npb))
for ipv in range(npv):
for ipb in range(npb):
ldi[ipv, ipb] = 2 * pi * 1 / 12 * (-2 * pv[ipv, ipb, 0] - pv[ipv, ipb, 1] + 6)
return ldi
class QuadraticModel1(LDModel):
def _evaluate(self, mu: ndarray, x:ndarray) -> ndarray:
return _eval_quadratic(mu, x)
def _integrate(self, x: ndarray) -> float:
return _integrate_quadratic(x)
[10]:
tm3 = RoadRunnerModel(QuadraticModel1())
tm3.set_data(time)
[11]:
flux3 = tm3.evaluate(k=0.1, ldc=array([0.56, 0.23]), t0=0.0, p=1.0, a=4.2, i=0.5*pi, e=0.0, w=0.0)
[12]:
plot(tm3.time, flux3)
[12]:
[<matplotlib.lines.Line2D at 0x7fd52c97ad50>]
Approach II b#
Next, we do the same but in a slightly more clean and concise way. We override the __call__ method and calculate both the limb darkening profile and its integral in a single function. I’ve also overridden the _evaluate and _integratemethods to raise an error if they’re called, just as a safety check.
[13]:
@njit
def _eval_and_integrate_quadratic(mu: ndarray, pvo: ndarray) -> ndarray:
if pvo.ndim == 1:
pv = pvo.reshape((1, 1, -1))
elif pvo.ndim == 2:
pv = pvo.reshape((1, pvo.shape[1], -1))
else:
pv = pvo
npv = pv.shape[0]
npb = pv.shape[1]
ldp = zeros((npv, npb, mu.size))
ldi = zeros((npv, npb))
for ipv in range(npv):
for ipb in range(npb):
ldp[ipv, ipb, :] = 1. - pv[ipv, ipb, 0] * (1. - mu) - pv[ipv, ipb, 1] * (1. - mu) ** 2
ldi[ipv, ipb] = 2 * pi * 1 / 12 * (-2 * pv[ipv, ipb, 0] - pv[ipv, ipb, 1] + 6)
return ldp, ldi
class QuadraticModel2(LDModel):
def __call__(self, mu: ndarray, x: ndarray):
return _eval_and_integrate_quadratic(mu, x)
def _evaluate(self, mu: ndarray, x:ndarray) -> ndarray:
raise NotImplementedError("The _evaluate method is not implemented, the __call__ method "
"returns both the limb darkening profile and its integral.")
def _integrate(self, mu: ndarray, x:ndarray) -> ndarray:
raise NotImplementedError("The _integrate method is not implemented, the __call__ method "
"returns both the limb darkening profile and its integral.")
[14]:
tm4 = RoadRunnerModel(QuadraticModel2())
tm4.set_data(time)
[15]:
flux4 = tm4.evaluate(k=0.1, ldc=[0.56, 0.23], t0=0.0, p=1.0, a=4.2, i=0.5*pi, e=0.0, w=0.0)
[16]:
plot(tm4.time, flux4)
[16]:
[<matplotlib.lines.Line2D at 0x7fd52c9b0ad0>]
Both versions work fine but the second one is slightly faster.
[17]:
qm1 = QuadraticModel1()
qm2 = QuadraticModel2()
[18]:
%%timeit
qm1(tm1.mu, array([0.56, 0.23]))
1.57 µs ± 10.1 ns per loop (mean ± std. dev. of 7 runs, 1,000,000 loops each)
[19]:
%%timeit
qm2(tm1.mu, array([0.56, 0.23]))
1.27 µs ± 9.39 ns per loop (mean ± std. dev. of 7 runs, 1,000,000 loops each)
©2024 Hannu Parviainen